
Several persons recently asked me stability curves of some of my projects , I e-mailed them the curves and the conditions in which they were calculated and several comments on them; in this post I will do a brief summing up of:
-
what’s stability in a boat and how we can measure it
-
what’s a stability curve
-
“maths for dummies” around stability curves
-
limits, tips and tricks of this kind of graphics

a boat heeled under the heeling moment given by the wind pressure on the sails
if you have the patience to read all the post you’ll understand why I tend not to provide stability curves of my project in the web pages, but I have no concerns of sending this data via mail if anyone is interested in the subject.
We’ll mostly speak and provide graphics examples about sailboats, but the same concepts are given for motorboats, basically the sea doesn’t care if you wander around with rig and sails and a ridiculous 20 HP engine or if you’re propelled by an humongous 2000 HP diesel engine, it’s just a matter of reciprocal positions of centres of gravity and buoyancy.
Disclaimer 1: this post is intended to absolute beginners or so, so I’ll simplify a lot aspects, if you’re deep into the subject you can trash it 😉
Disclaimer n. 2: if you’ve became curious about the subject after reading this article, there’s an old book which goes through the subject in all its aspects : “Seaworthiness , a forgotten factor” by C.A. Marchaj , purchase it; you’ll learn a lot, really, and you’ll probably end up thinking that we sport-boaters are all crazy wannabe suicides, and you’ll hurry up to buy a wonderful long keeled old boat of 13 tons of displacement for 10 meters length (ROCK STEADY AND SAFE) 😀 😀 😀
What’s stability in a boat ?
we can define it as “the attitude to counter anything that heels the boat”
Which conditions are we considering: I’m not interested here in taking into acount all the forces to which a boat is submitted while sailing (wind pressure on sails, resistance by water, forces by waves, drag by air resistance), since I’m only focussing here on a basic analysis of transversal static stability
we have to introduce three basic concepts:
-
center of gravity (we’ll call CG in the graphics): no matter where the boat is in or out of the water, take the boat as a whole, CG is the point where you can consider applied the entire weight of the boat , that’s to say the gravity force, so this force applied exactly in this point will move the boat without any rotation, simply translating it ; in our case we’ll basically use CG to show what happens to our boat when weight, that’s to force given by gravity, is applied in this point ; in mathematical terms CG it’s a weighed average of all masses present in the “system boat” , we’ll discuss later how much important is to know where CG is located in our boat;
-
center of buoyancy (CB in the following): consider the submerged portion of the boat: consider a volume of water which is identical to this submerged volume; the CB is the centre of gravity of this volume of water displaced by the boat submerged to her waterline
-
weight and displacement: there is a lot of confusion around these two concepts. Nothing so much complicated: weight is a weight, a force created by gravity that points towards the center of earth, the concept of weight for a boat is exactly like when you put a pack of pasta on a scale and read 500 g , imagine you simply put the whole boat on a scale and read 3543 kg , plain and simple. Displacement involves that our boat is floating on the water, and the displacement is exactly the volume of the water displaced by the boat, simple as that, so the weight is a force, and the displacement is a volume ; confusion arises since most of commercial articles tends to express displacement in tons or kgs or pounds (I’ll do it later too, sorry) , instead of m3 or cubic feet ; they’re doing a mistake, they’re counting the weight of the displaced volume of water , which by Archimede’s principle is equal to the boat’s weight, so they call it displacement but they’re giving the weight numbers. Basically they’re simply two faces of the same medal you can pass from one to the other multiplying for water specific weight.
example n1: an unheeled sailboat : we have no sails, sea is still, boat is still, the only two forces present in our system are: boat weight , applied in CG, and buoyancy ( upward force given by water displacement, if it’s not clear see Archimede’s principle on wiki) , boat is still, so these two forces must be equal and opposite , they lie on the same line, there ‘s no arm between them

example n.2 : a heeled boat (because she’s under sails or for whatever reason, where not interested in it here) , we can see here that while CG has moved steadily with the boat, rotated as if it is fastened within the boat, CB has modified because heeling the boat we modify the shape of the submerged body , and CB moves consequently ; the consequence is that now there’s a arm among CG and CB , given this two forces (buoyancy pointing up and weight pointing down) the boat will tend to rotate to came back in the unheeled position with no other forces to keep her heeled (force of wind in the sails, tipically) , we can say that the more this arm GZ is big the more the boat will tend to restore her initial position ; we’ll call this “Righting Arm” GZ ; if we multiply this GZ for the boat’s displacement in this conditions we’ll obtain our so long desired stability measure, called Righting Moment , or RM (in physic a moment is a force multiplied for a distance ), so we can basically raise our boat’s stability working on GZ or increasing the boat’s displacement (this is somehow counter intuitive, we’ll detail it later)

now let’s consider two different hull shapes : first one is a classical long and slender narrow body yacht , long keeled or with a fin keel it’s not so important, second one is a modern offshore racer, with a very beamy hull and a deep fin keel with lead torpedo on the tip; let’s see how they behave when heeled in normal upwind conditions ; basically in the first kind of hull no matter how much you heel the hull, righting arm GZ is quite small, so if you want to reach a decent amount of stability you ‘ll have to work on weight, keeping the boat heavy and most of all providing a high fraction of weight down in ballast , this is the typical situation of classical boats and long keeler , this a so called “weight stability hull”, that is to say they rely mostly on weight to generate their righting moment RM; on the opposite side a very beamy hull will generate a good amount of righting arm (GZ is clearly bigger) when heeled , so that you can have good values of righting moment even with lower displacements, this a so called “form stability hull” , that’s to say that hull shape is in charge of generating righting moment when boat heels ; of course any intermediate situation is possible.

CG position and weight : we said that the stability, righting moment RM, is given by
righting moment ( RM ) = righting arm ( GZ ) x boat displacement (displ.) or weight
this will may let us think that brutally raising the boat’s displacement will increase stability; that’s definitely not true; the real mantra is “LOWERING THE CG” , since CG position affects heavily also righting arm, that’s to say if we brutally add displacement without lowering CG we’ll decrease GZ, thus worsening our boat stability; to put it simple, keeping the CG as low as possible for a given displacement is the real key to improve stability for a given hull shape as you can clearly see in the picture (CG shifts are exaggerated, but concept is clear); that’s why racing sailboats struggle to keep all the weights low down and keep everything fitted up on he boat as light as possible (an example: the real success of carbon rigs is that they’re really lighter for a given stiffness, and their weight saving is a lot of meters from waterline , so they provide a decisive contribution to lower the CG on a yacht and to raise the righting moment, they also dramatically decrease moment of inertia, but that’s a story we’ll tell in another post…).

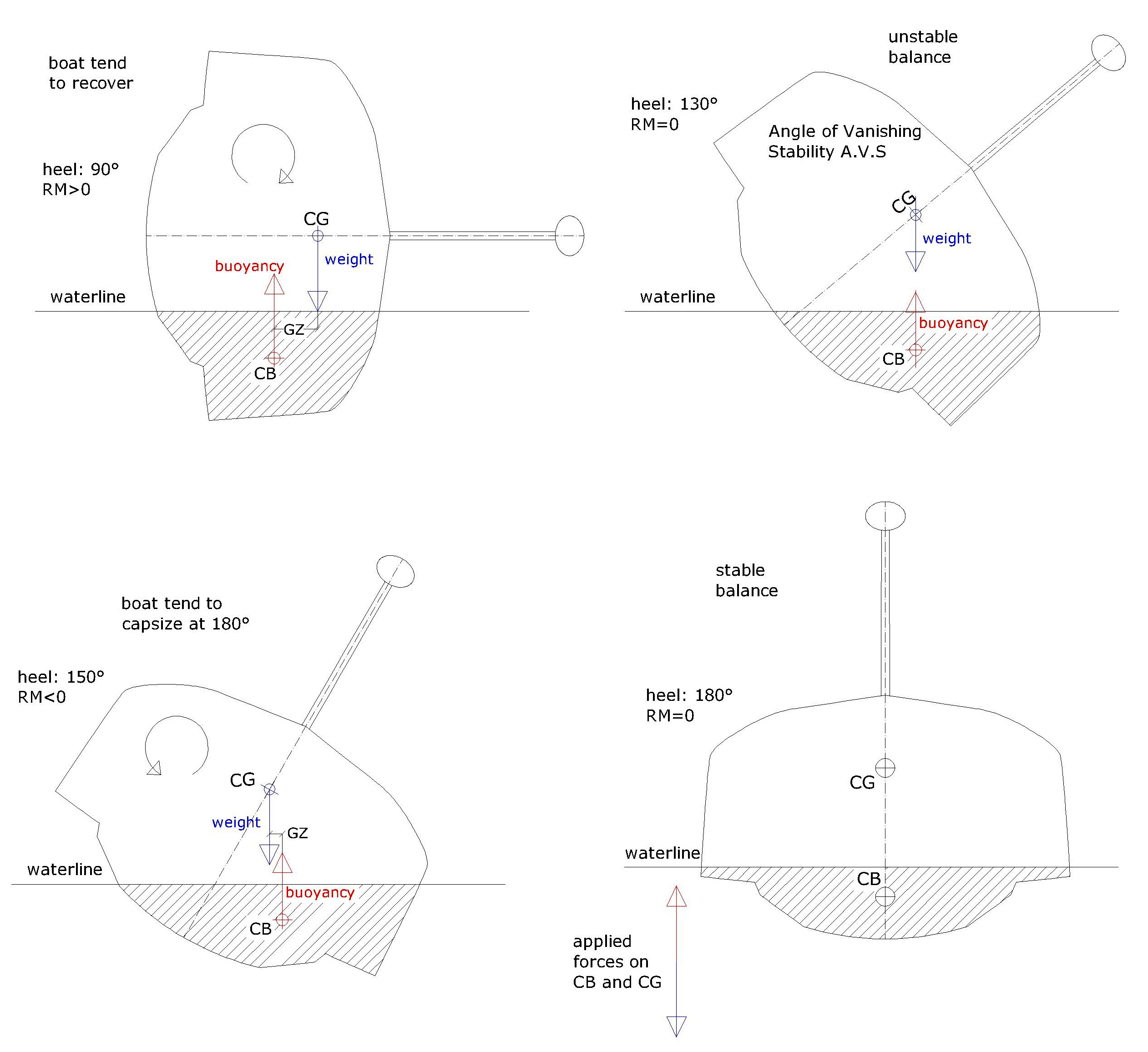
now let’s keep on heeling the boat, measuring the heeling angle in degrees form 0 to 180° and the so called “righting arm” GZ , we’ll reach some interesting milestones :
-
90 degrees : GZ is not so big but it still exists and forces are oriented so that boat will tend to recovery from this uncomfortable position , this means if a gust or a wave knock us down with mast parallel to the water, boat will recover , the bigger is GZ in this case, the faster the boat will recover
-
130° degree or similar : we’ll call this AVS , that is to say Angle of Vanishing Stability, that is the exact heeling angle when GZ goes to zero with the boat turtled upside down, not an enjoyable situation at all; this an equilibrium point, a condition called unstable equilibrium , since if we heel the boat one more degree she will capsize completely, if we heel the boat one degree less she will slowly recover (providing she’s somehow watertight and not flooded by water)
-
somewhere among AVS and 180: in this zone boat will tend to capsize and goes to 180° (see how forces are oriented)
-
180 degrees: boat is capsized and perfectly steady, if sea is still and no forces act on the system boat will stay capsized , buoyancy and weight are perfectly aligned, this is situation similar to the starting one, just a little bit more dangerous…
now let’s put this results in graphic form , we’ll build a curve with GZ/RM on vertical axis and heeling angle on horizontal one, this is a so called “Static Stability curve”
why “static” ? Because all the situations that we examined until now are static situations, no effects of speed, of inertia , no sea waves and so on, are involved ; imagine that you’re heeling the boat with no sails hoisted, in a flat water harbour, pulling the mainsail halyard slowly from the top of the mast with a purchase or a winch fastened on the pier , which is exactly what happened to the poor IDEA19 “Muchacha” in the following movie (don’t worry, no boat has been harmed to produce this movie !)
by the way: the one shown in the video is a somehow brutal way to obtain a “on the water” stability curve; put a load cell among the purchase and the pier, measure the pull force, measure the heeling angle , do some maths to convert the pull force into righting moment and place the values on a curve like the one below.

now lets’ do a little bit of mats for dummies on this graphic
-
how much is a boat “stiff” or “tender” under sail in normal heeling conditions: this is given by the slope of the curve in the first part, let’s say up to 20° of heeling, the steepest the curve, the stiffer the boat (boat 1 , blue curve , stiffer , boat 2, red curve, more tender); having a stiffer boat is not necessarily an advantage , specially for a cruiser, anyway ;

-
what’s the meaning of area under curve marked as green area ? this the amount of energy that you (or a wave…) have to deliver to the boat to capsize her until she has no more stability left, so the bigger this area the more the boat is resistant to capsize
-
what’s the meaning of the area under the curve marked in red ? this is basically the energy that you have to provide to the capsized boat to recover her from the capsize; it’s very important that this area is quite small, since this means that even the energy given to the capsized boat by waves will be decisive to recover her from a capsize (or the shifting of weights internally) ,making the boat almost self-righting in each situation
- RM30 : that is to say the righting moment at 30° of heel; this measure is quite important because it’s often taken as the reference righting moment to consider properly size the rig in traditional rig design calculations

how about motorboats ? Basically the concept are the same, but motorboats, specially fast modern ones, have normally a CG quite high in the hull so it’s quite normal to have a stability curve with an angle of vanishing stability in the range of 50-60°, since they don’t have ballasted keels basically, and often they have quite high and heavy superstructures, sundeck and steering position on flybridge, roll-bars, radar antennas and several other heavy stuff fitted high on the hull.

How does these numbers affect the boat’s behavior in real sailing conditions ?
Good question: keep in mind that all the considerations that we’ve made are simplified , let’s take into account several facts:
-
stability curves are strictly related to boat weight (or displacement) : significant displacement changes can happen in small sailboats simply loading the water and luggages for a cruising week with a crew of four, so every stability curve must be provided giving a clear indication of loading conditions and displacement
-
CG position: this the most important parameter for stability curves computing, together with hull shape, but while this last one is a fixed parameter for a given boat, on small boats CG can shift up and down for 30-40 mm (which is REALLY A LOT, believe me) depending on loading conditions and depending on where we store our stuffs on board, so every stability curve must come together with CG position and explaining to which realistic loading conditions this CG position is related.
-
These two points are the reasons why I don’t publish stability curves of my projects on their webpage , since giving a stability curve without detailing the loading conditions and CG position has a very little meaning, while talking about a “family” of stability curves for a given boat with different loading conditions has a meaning.
-
Heeling and pitching: they’re strictly related, although in this post we “isolated” heeling from other movement of the boat, in real world a heeling boat will change is fore-after trim too, and this is much more true for beamy hulls , which may tend to bury the bow in waves when heeled (that’s why idea 21 and idea 850 hulls provides a lot of volume on the bow sections, to counter this effect)
-
Static stability vs. dynamic one : boat motion affect stability, mostly in a seaway or while boat is planing (if she can); to put it really simple, the fastest the boat the more static stability loses importance; new generations of foiling sailboats changes so radically their behaviour with speed that static stability has practically no meaning for a new imoca60 or a foiling Gunboat cruising catamaran , nonetheless these concept are still quite important for “normal” sailboats although fast ones
-
transversal stability: we just talked here about transversal stability, so we considered heeling, but boat has three axis of movement, so we can talk also about longitudinal stability (pitching) and yawing stability (by far less common)
-
summing up transversal static stability is one of the many technical parameters that you can consider when you decide to purchase or build a new boat, or when you’re considering how to improve your current boats’ performances; discuss it with boat designers, don’t a take a stability curve given by a commercial brochure as the bible , and use this as a mere excuse to deepen your knowledge on technical aspect of sailing if you like them.
-
How to calculate a stability curve: basically these curves are calculated with dedicated software package , so if you need one for a given boat, ask to the designers. Otherwise go for the way shown in the previously attached clip
-
hot calculate CG position: basically there are two possible ways : analytic and “on the boatyard” , first one requires writing a spreadsheet including all the items that make the boat (everything: hull, rig, sails, deck gear taken one by one, systems, furnitures) for every item we’ll detail weight and position on a XYZ axis system, CG will be the average of all these (see wiki for details), this is normally done while designing a boat, and it gives really good results if you really take into account everything in the exact position; the second one involves measures taken with the board on a special scale out of the water or other tricks, quite a complex subject, I’d better write a post about it sooner or later…
Fair wind !!!
Cristian Pilo
A couple of books on which this aspect is treated ( with many others subjects ):
-
“seaworthiness a forgotten factor “ C.A. Marchaj
-
“principles of yacht design “ Larsson, Eliasson, Orych